Vous l’aviez peut-être remarqué en cherchant un itinéraire passant par Commerce : Naonedbus ne proposait jamais de descendre à cette station pour rejoindre un autre arrêt, mais vous demandait de descendre à Bouffay ou Médiathèque. Ce qui était totalement absurde.
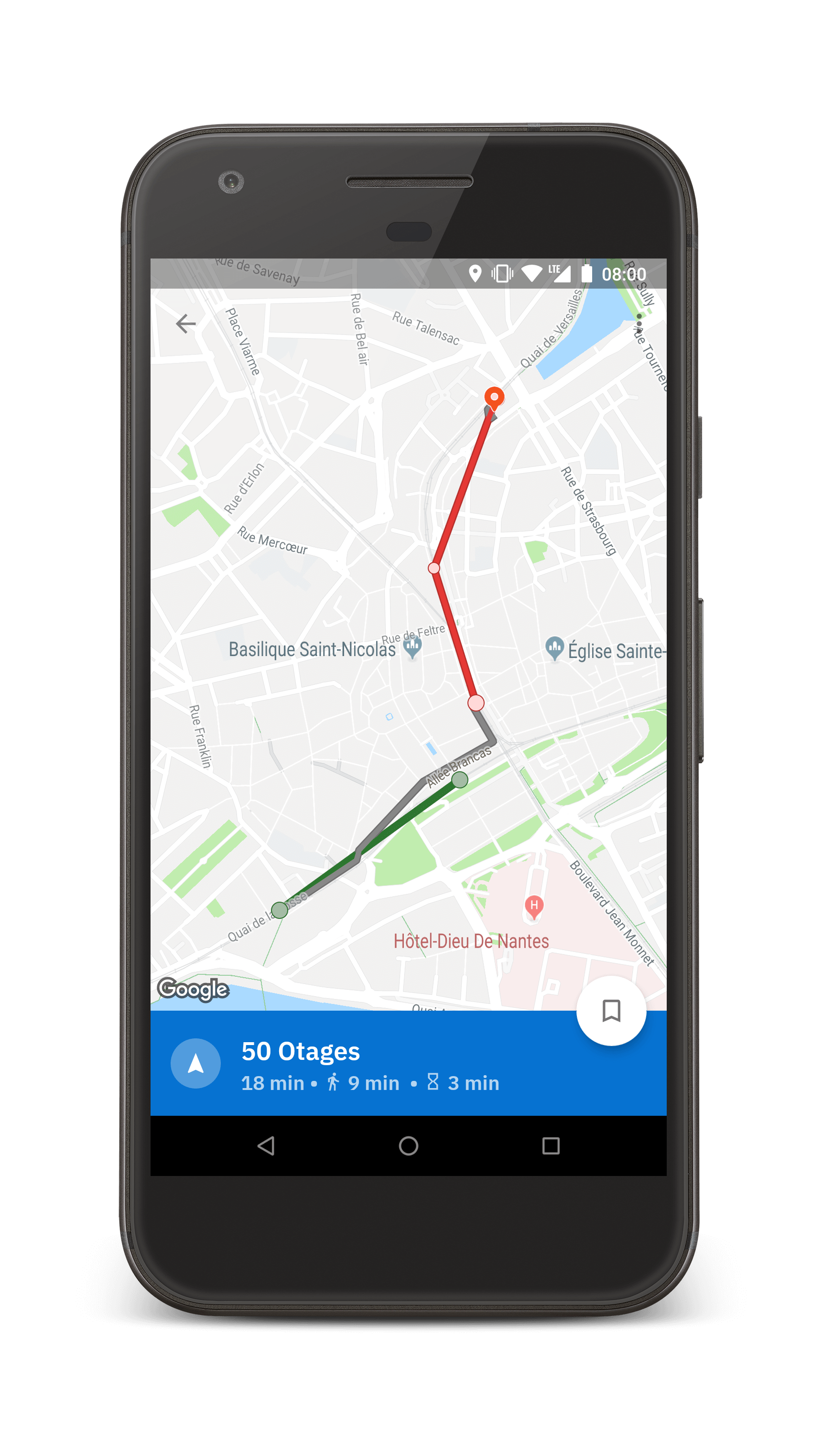
Dans Naonedbus les itinéraires sont calculés via le logiciel OpenTripPlanner. Pour guider l’utilisateur dans les parties piétonnes de l’itinéraire, OpenTripPlanner se base sur la cartographie d’OpenStreetMap. Ça fonctionne très bien dans la plupart des cas, sauf quand il manque des données, comme à Commerce.
Il était virtuellement impossible de descendre à Commerce et rejoindre à pied un autre arrêt : la station de tram de la ligne 1 était comme une île pour piétons. OpenTripPlanner proposait alors en toute logique de descendre à la station suivante ou précédente et de faire le reste du chemin à pied.
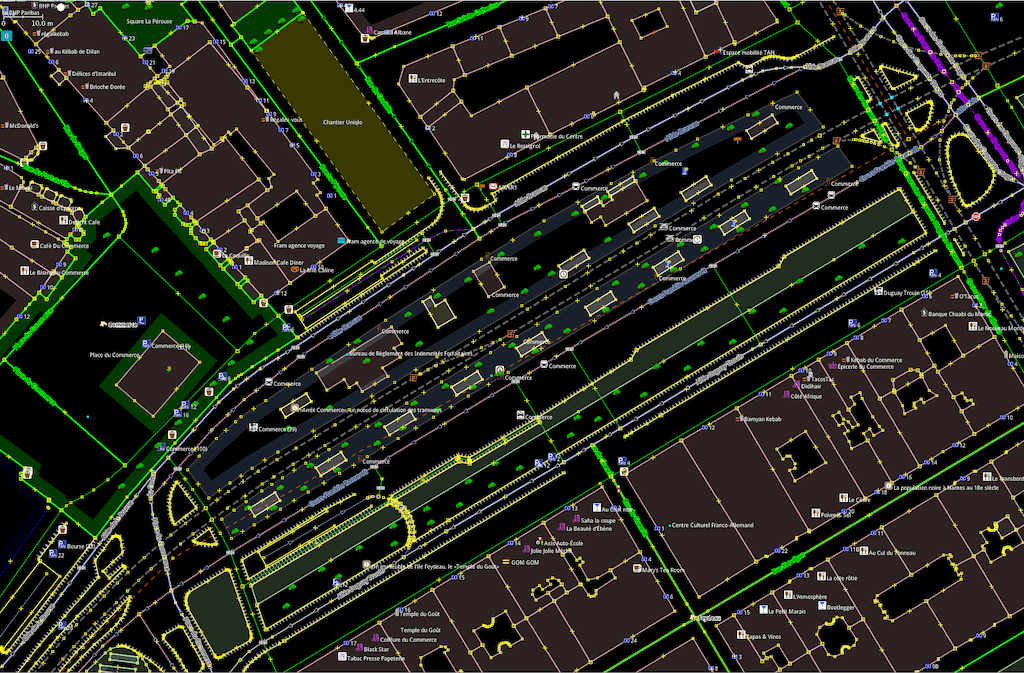
Il manquait tout simplement des connexions piétonnes entre les trottoirs et les quais dans OpenStreetMap. Début mai 2019 j’ai rajouté ces connexions, et le problème était réglé 🥳